Robotics • Controls • Autonomy
Building intelligent systems that navigate, sense, and adapt from CubeSats to underwater vehicles.

About Me
I’m a robotics engineer pursuing my Master’s in Robotics at Northeastern University, with a focus on control systems, autonomy, and mechanical design. I have built robots across air, sea, and space including CubeSat ADCS, multithruster AUVs, Aerial Drones. I enjoy developing controllers, modelling dynamics, and designing the mechanical systems that bring these robots to life.
Projects
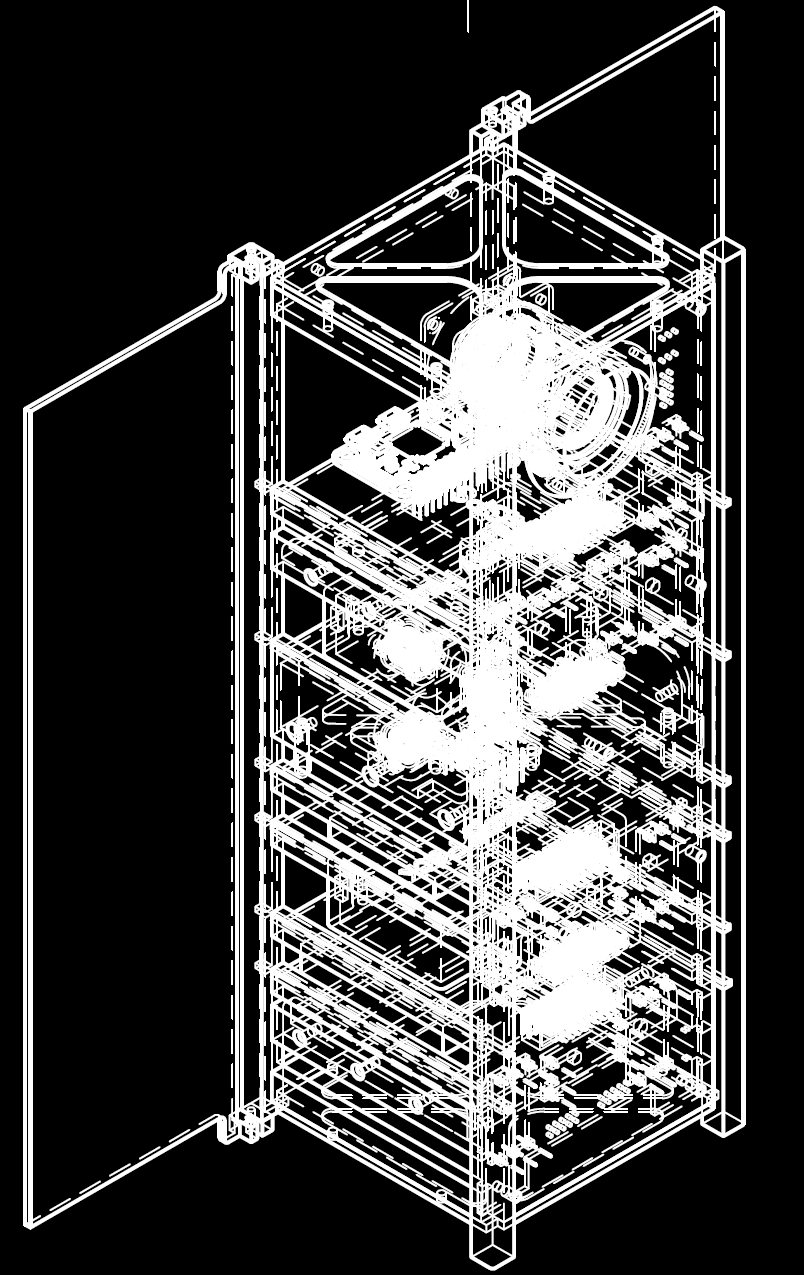
Harika Mark-1 (CubeSat)
3U CubeSat with a monolithic Al-7075 chassis and in-house ADCS. Reaction wheels + EKF-based attitude control achieving <2° pointing error.
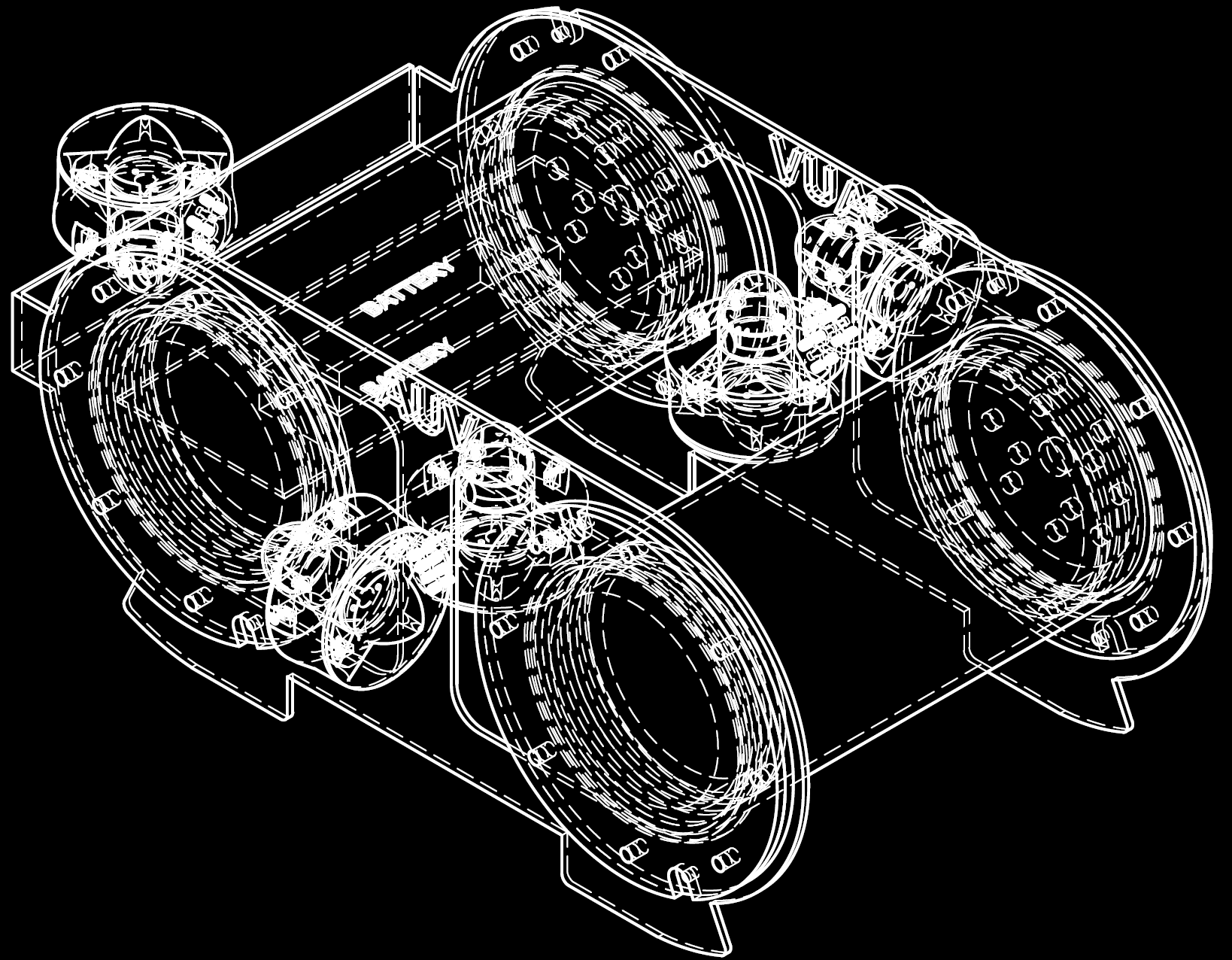
Autonomous Underwater Vehicle (AUV)
Dual-hull, five-thruster AUV optimized with CFD for 8.3% drag reduction. ROS on Jetson + Pixhawk for autonomous underwater navigation.
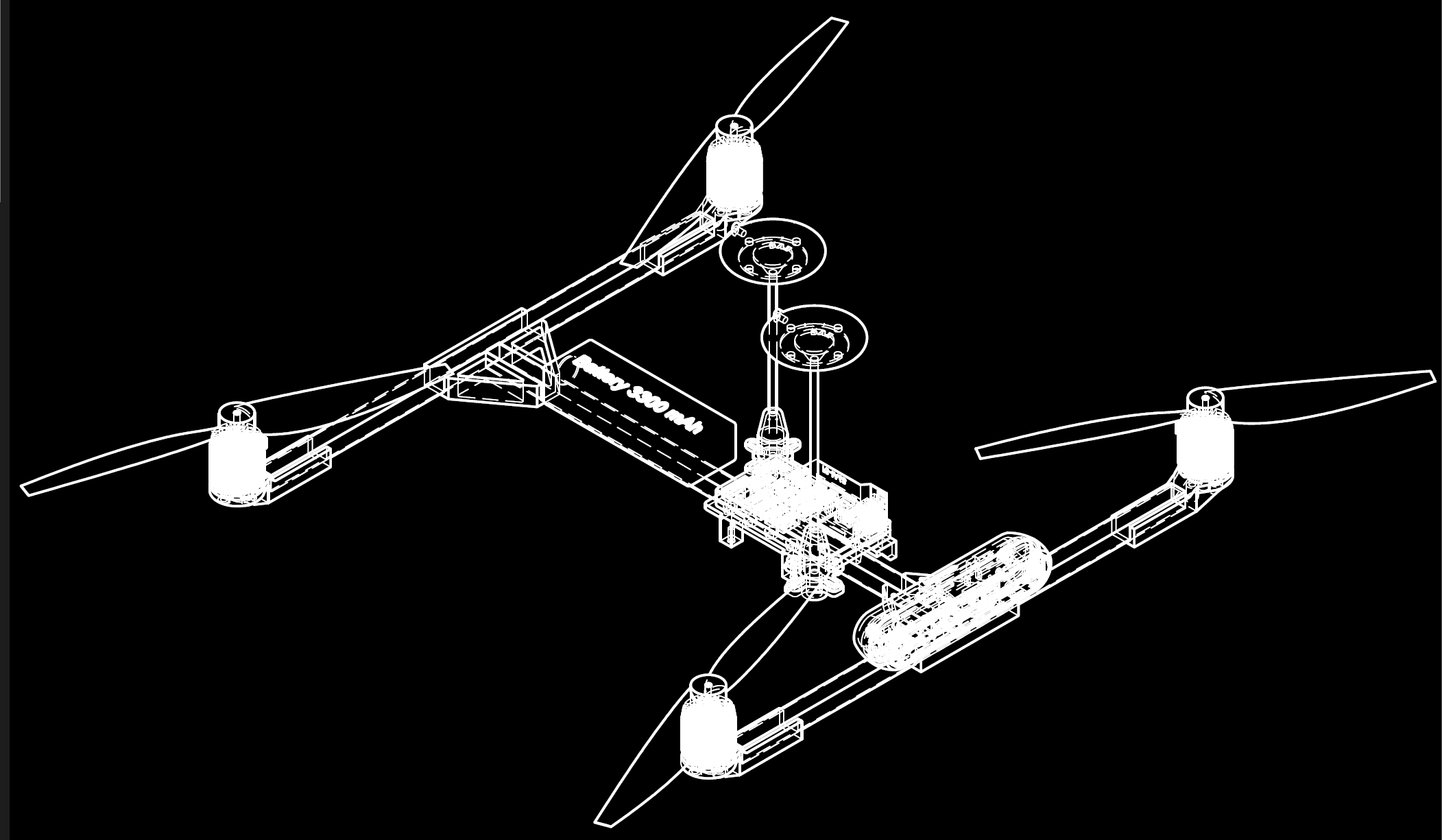
Unmanned Aerial Vehicle (UAV)
Custom 3D-printed UAV frame with IMU/GPS-based navigation and obstacle-aware autonomous flight.
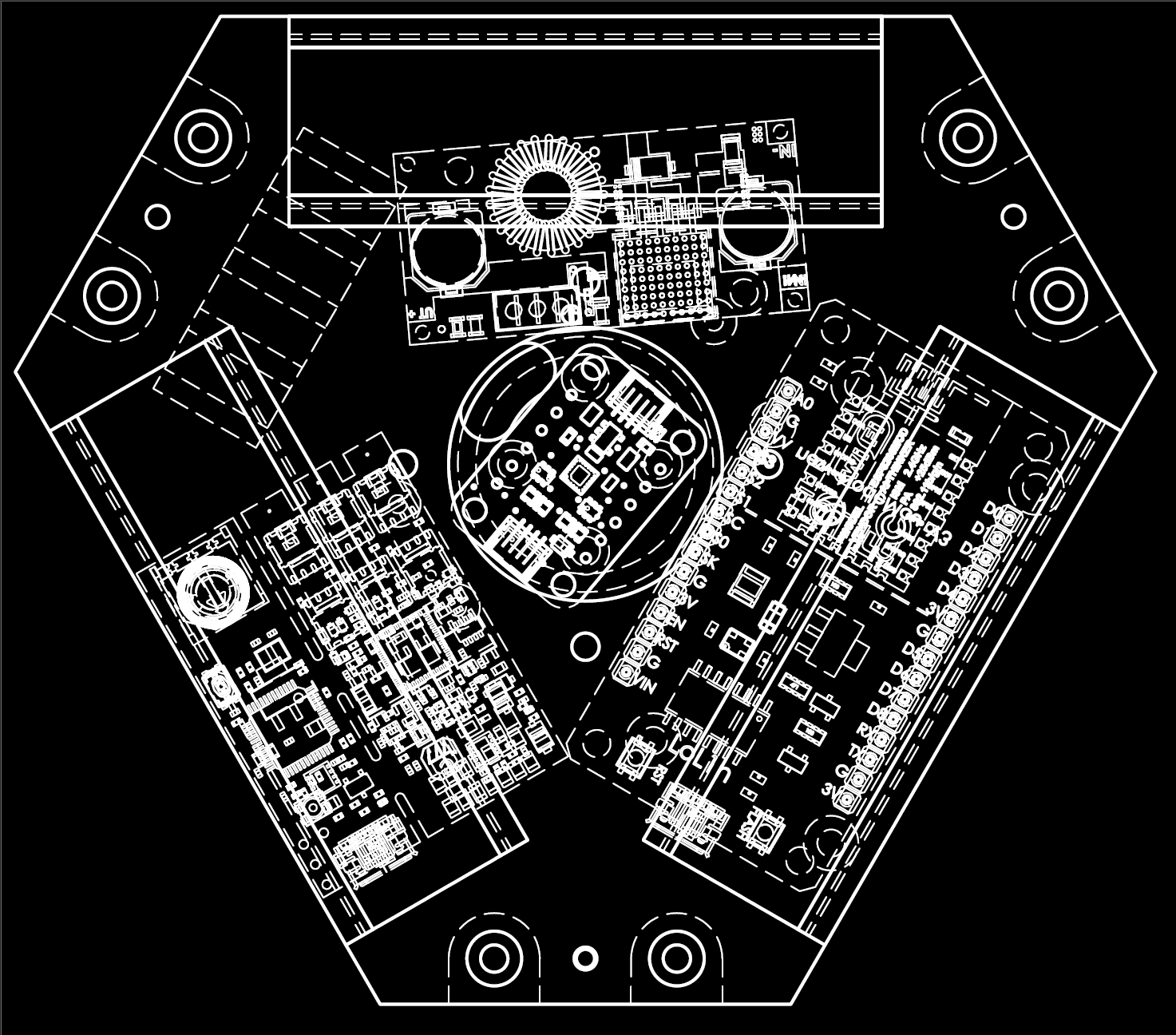
Attitude determination & Control System
ADCS for 3U CubeSat using reaction wheels and EKF, achieving precise <2° attitude control.

Coming Soon
Another project is on the way more work in mechatronics, autonomy, and control will be documented here.
Experience
At Godrej & Boyce’s Aerospace division, I developed an autonomous inventory-scanning drone tailored for a GPS-denied, multi-level warehouse. The project combined mechanical design, autonomy, simulation, and ROS 2 navigation to replace slow, high-risk manual scanning workflows..
- Designed a PETG/carbon-fiber airframe optimized for narrow multi-level aisles and high-stiffness LiDAR payload mounting.
- Integrated 360° LiDAR with ROS 2 + Nav2, tuning costmaps and planners for reliable autonomous navigation in a GPS-denied, metal-shelf environment.
- Built a high-fidelity Gazebo digital twin to validate missions, reducing first-article test time by ~47% and enabling ~4× faster top-shelf inventory scans compared to manual processes.
Worked under Prof. Herbert Tanner on advanced communication frameworks for coordinating missions between Autonomous Underwater Vehicles (AUVs) and Unmanned Surface Vehicles (USVs) using GobySoft middleware..
- Developed a multi-vehicle communication stack for AUV–USV teams using GobySoft, combining acoustic and RF channels for underwater and surface links.
- Implemented a nested communication architecture with a USV acting as a relay, improving robustness of command and telemetry between submerged AUVs and shore control.
- Created simulation and visualization workflows in pMarineViewer, achieving >95% packet delivery in validated mission scenarios and reducing on-water debugging time.