← Back to Projects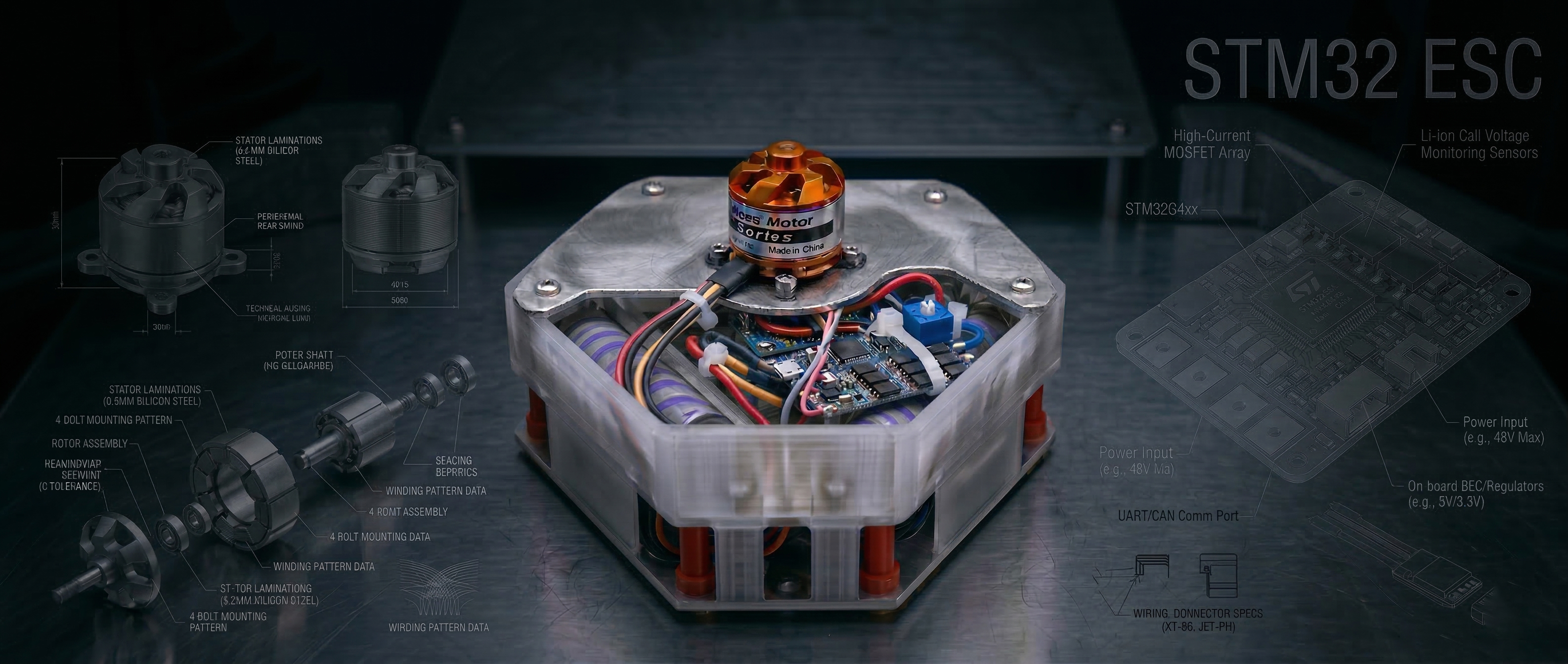
Attitude Determination and Control System
Low-cost Attitude Determination & Control System using BLDC reaction wheels, EKF-based sensor fusion, and a custom air-bearing testbed.
2024
ADCS Lead
Overview
Developed a student-built Attitude Determination and Control System for the 3U CubeSat Harika Mark-1, using low-cost COTS sensors and three orthogonal BLDC reaction wheels to achieve precise, power-efficient attitude control. An STM32L051 microcontroller fuses measurements from a 9-DOF IMU, BMM150 magnetometer, dual-redundant Accord GPS and GaAs solar panels (as sun sensors) through an Extended Kalman Filter, and drives the reaction wheels via a sensorless FOC ESC. The complete ADCS was integrated on a custom aluminium air-bearing testbed, enabling hardware-in-the-loop tuning and validation of the control algorithms before on-orbit deployment.
Outcomes
- Closed-loop ADCS prototype achieving < 2° steady-state attitude error and about 40% faster stabilization compared to baseline control in simulation and hardware tests.
- Low-cost sensor + BLDC reaction wheel architecture suitable for resource-constrained CubeSats, validated on a custom air-bearing platform with near-zero friction.
- Work published at IEEE ISTEMS 2024, demonstrating a feasible ADCS design pathway for student 3U CubeSat missions.
Gallery