← Back to Projects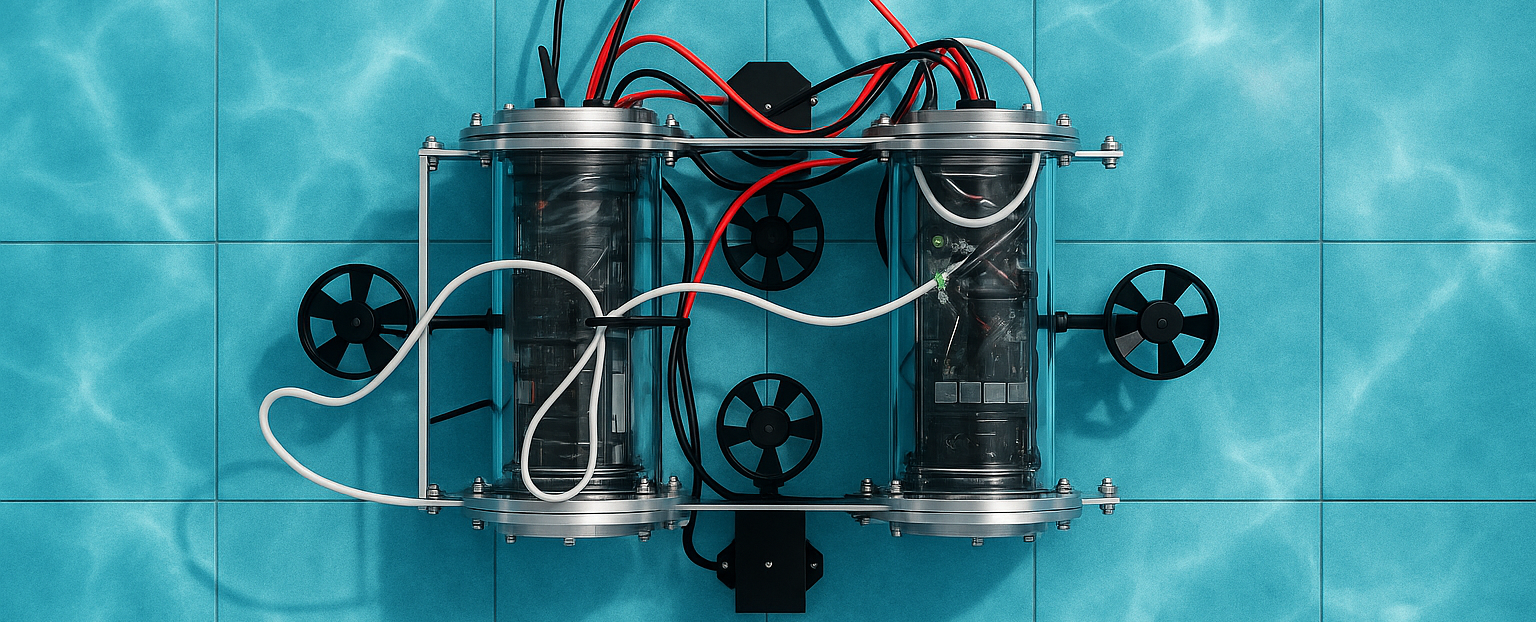

Autonomous Underwater Vehicle
Dual-hull, low-cost Autonomous Underwater Vehicle for vision-guided navigation, CFD-optimised hydrodynamics, and multi-thruster control.
2022 – 2023
Mechanical Head
Overview
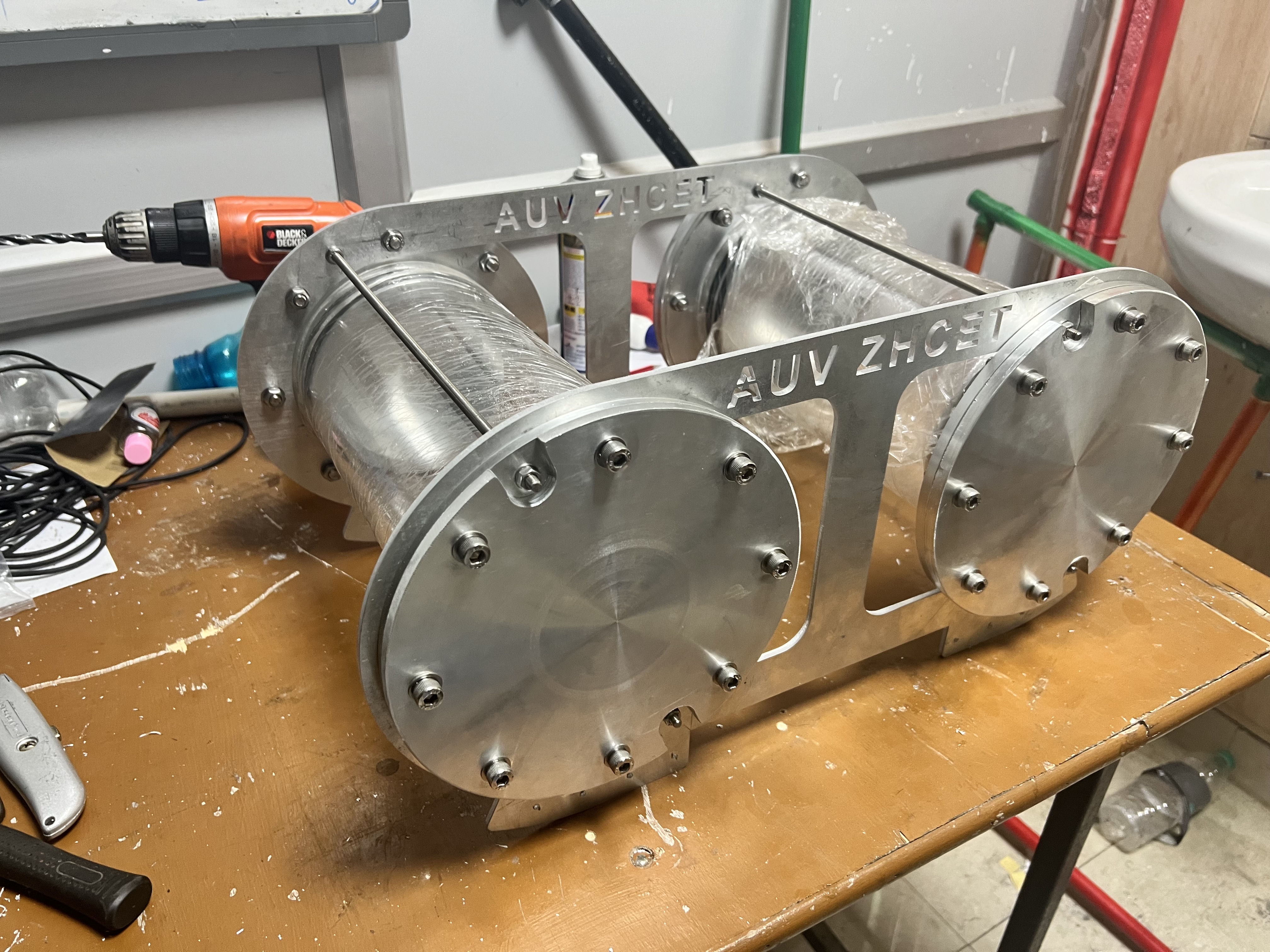
Led the design and fabrication of a dual-hull, five-thruster AUV as a low-cost platform for underwater vision and controls research. The vehicle uses tandem acrylic pressure hulls on an aluminium 6063 space-frame, separating the electronics bay from the battery compartment for modular servicing. Computational fluid dynamics in Autodesk CFD was used to minimise drag, while Fusion 360 static analysis validated the acrylic and aluminium structure for pool-depth operation. Onboard Jetson Xavier and Pixhawk run a YOLOv7-based perception stack, ArduSub control, and mission logic for fully autonomous pool trials.
Outcomes
- Achieved an ≈8.3% reduction in drag coefficient compared to a baseline AUV design through CFD-driven hull and fairing optimisation.
- Validated hull and flange design for 2 m test depth with large safety margins against acrylic and aluminium yield strengths.
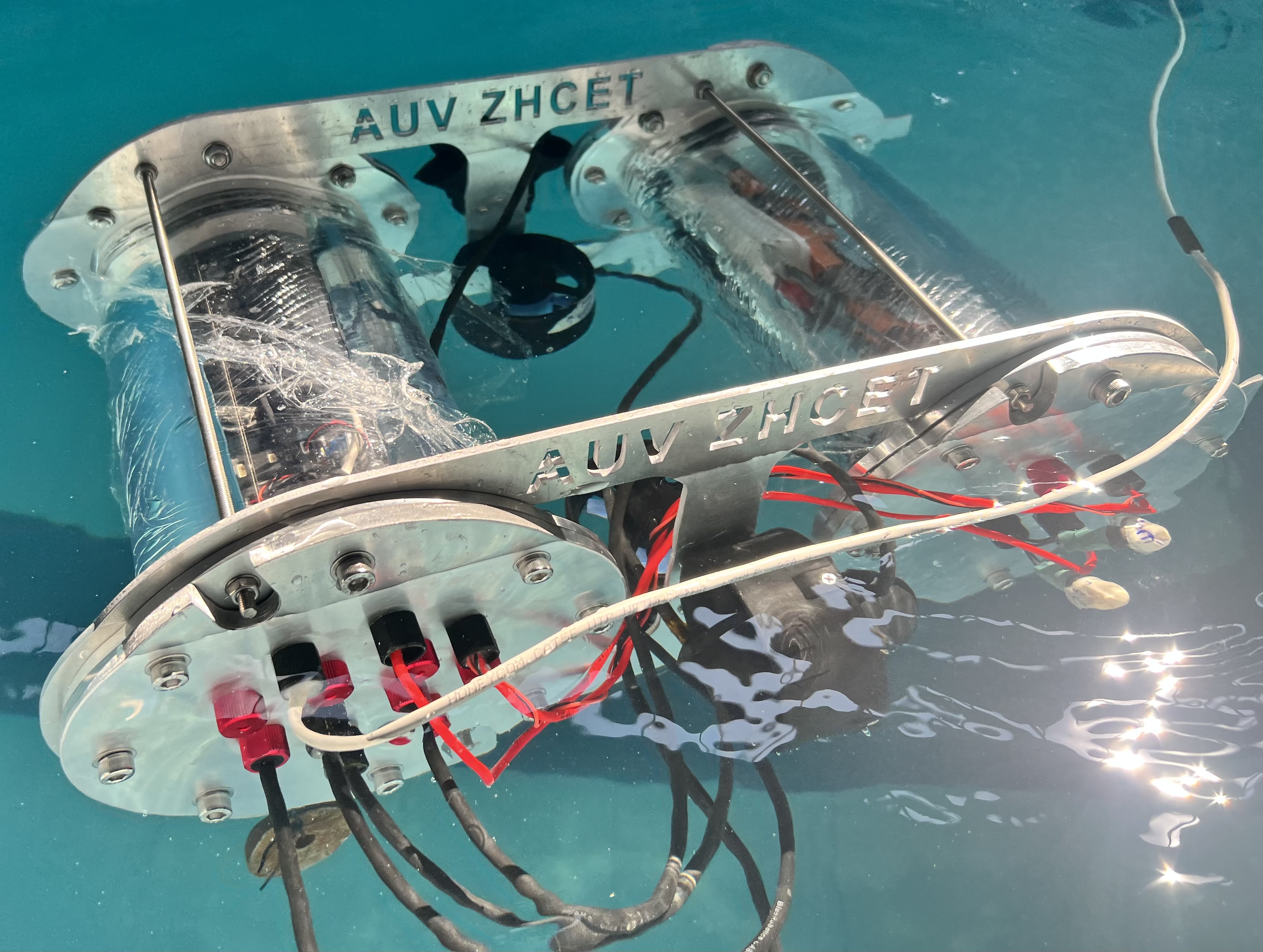
- Integrated Jetson Xavier, Pixhawk/ArduSub, Intel RealSense, and multi-sensor stack to enable autonomous vision-guided pool missions and qualification for the Singapore AUV Challenge.
Gallery